

无人机操控技术(无人机系统自动化操作分级研究)

导读
文章介绍了JARUS和中国对无人机系统自动化操作分级的相关研究、航科院自主研制的无人机系统分布式操作运行等级仿真验证评估平台,并对无人机系统自动化操作运行进行了总结。
01
前言
当前,民用无人驾驶航空快速发展、迭代演进,航空器飞行能力不断提升,运输范围逐步扩展,自动化、自主化、智能化趋势更加明显。驾驶员职责逐步向以自动化系统为主、人员辅助监视转变。划分等级确定对应标准是自动驾驶领域的通行做法,汽车自动驾驶即是在自动化分级的基础上形成标准,对研发和运行予以规范。JARUS(Joint Authorities for Rulemaking of Unmanned Systems)采用类似的方法,对无人机系统自动化操作进行分级研究。为进一步促进我国民用无人驾驶航空分布式操作运行持续健康发展,中国民用航空局制定了《民用无人驾驶航空器系统分布式操作运行等级划分》(MH/T 2013-2022),提出了无人机系统自动化分级方案。
02
自动化分级研究
2.1 JARUS自动化操作分级
JARUS提出了一种无人机系统操作自动化评估方法,用于评估自动化程度对无人机系统操作的影响,同时引入运行设计范围(Operational Design Domain, ODD)的概念,确定系统自动化功能范围,帮助管理复杂的多维操作环境。
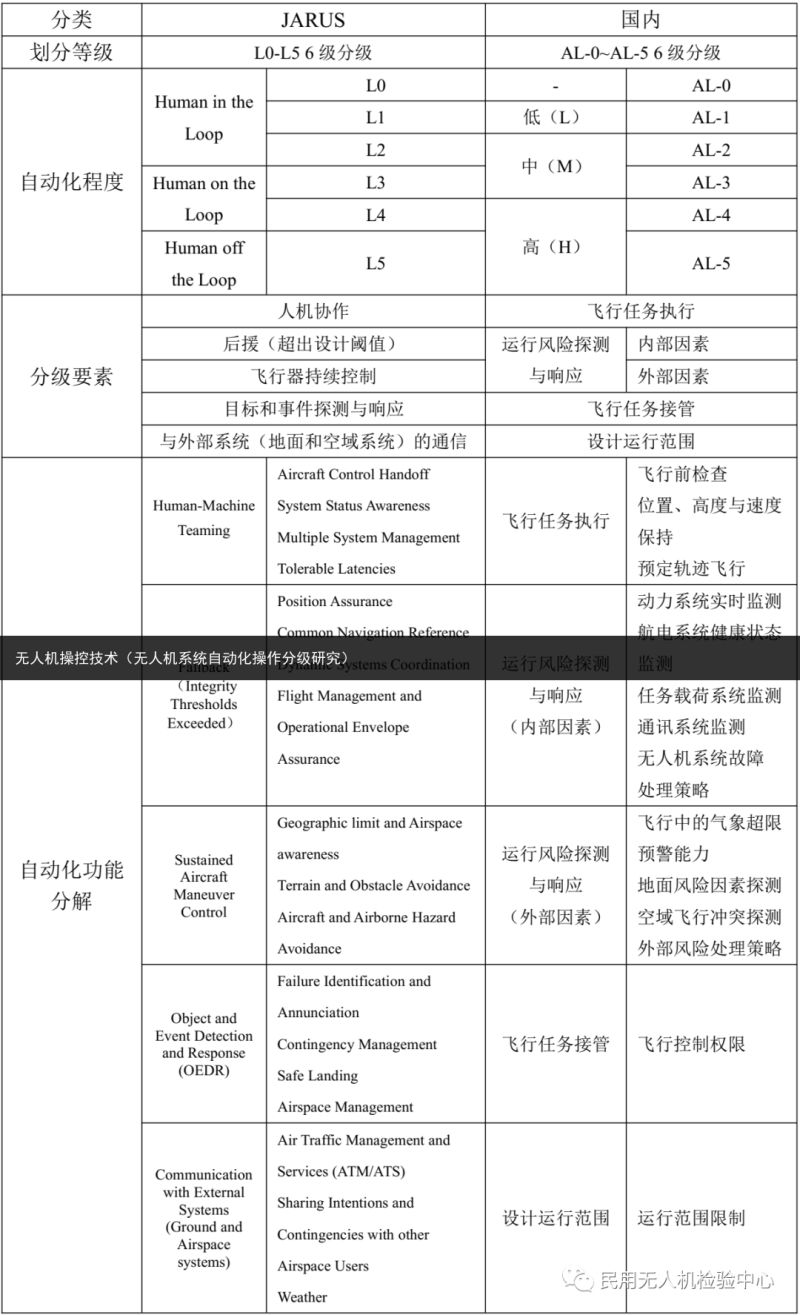
JARUS基于飞行操作中的系统功能进行自动化等级评估,提出了无人机系统操作自动化6级分级方案,该方案将自动化功能划分为人机协作、后援(超出设计阈值)、飞行器持续控制、目标和事件探测与响应、与外部系统(地面和空域系统)的通信五个分级要素,根据功能执行中操作人员与系统承担的角色、责任进行无人机系统自动化操作等级划分。

L0-手动操作
L0-手动操作,界定功能的ODD内,操控员完全负责功能执行,无须系统支持。
例:L0级别的空速控制功能,基于操控员的视觉判断手动调整油门/RPM控制空速,无须系统测量空速。
例:L0级别的空中避撞功能,操控员探测空中冲突、跟踪和预测其它飞行器的飞行轨迹,并基于相对位置、飞行路径、局部空域环境和空中交通规则手动控制避免飞行器冲突。
L1-辅助操作
L1-辅助操作,界定功能的ODD内,操控员负责功能执行,系统为操控员提供环外支持。
L1级别,系统为在环上人员提供有限的信息,支持操控员执行飞行任务。L1级别需要详细设计系统管理权限,操控员在回路中,系统可以提供操作建议,和操控员共同控制飞行。
例:L1级别的空速控制功能,系统提供当前空速和最小、最大限制。操控员利用提供的信息调整油门/RPM控制空速。
例:L1级别的空中避撞功能,系统提供支持信息,例如潜在冲突的警报(视觉、听觉)提示和方向指示。操控员需要确认冲突,预测其它飞行器的飞行轨迹,并基于相对位置、飞行路径、局部空域环境和空中交通规则手动控制避免飞行器冲突。
L2-任务减少
L2-任务减少,明确界定功能的ODD内,操控员在环管理,系统可以减少操控员工作量,例如,系统可以预测飞行路径中的风险冲突,系统告警并为操控员提供解决建议。
L2级别,人机共享监测和控制权限。操控员负责功能执行,系统承担功能在环的角色,可以提供更重要的信息支持,帮助操控员减少任务所需的技术操作,但操控员可以随时接管控制。
例:L2级别的空速控制功能,操控员控制空速,系统根据操控员需求调整RPM/油门。
例:L2级别的空中避撞功能,系统提供支持信息和建议,例如,基于预测的飞行路径、局部空域环境和空中交通管理规则的冲突警报和解决建议。操控员需要验证系统提供的信息,控制飞行器避撞。
L3-监督自动化
L3-监督自动化,明确界定参数的ODD内,系统在操控员的监督下负责功能执行,操控员负责持续监控飞行过程,根据需要进行干预。例如,与自动驾驶系统相连的自动交通防撞(TCAS)系统,当冲突告警时,系统可以自动执行功能避免空中冲突。L3级别与较低级别的自动化操作区别是,操控员不知道功能执行中系统的内部状态,而是监督系统内部探测结果,并在安全管理要求时进行干预。
L3级别,需要详细的人机协同操作设计,系统负责功能执行,可以为操控员提供足够的信息和能力,操控员根据预设条件进行干预,及时从在环上到在环内。
例:L3级别的空速控制功能,在操控员的监督下,系统定义符合任务阶段的空速指令。操控员可以监视、干预和根据需要设置新的空速指令。
例:L3级别的空中避撞功能,系统负责探测空中风险冲突,跟踪和预测其它飞行器的飞行轨迹,并基于探测的相对位置、飞行路径、局部空域环境和空中交通规则避免飞行器冲突。系统主动进行自我监控,为操控员提供系统状态信息,操控员持续接收系统提供的状态信息和相关参数,主动监控系统的响应,根据需要干预和调整系统响应策略。
L4-异常管理
L4-异常管理,明确界定参数的ODD内,系统负责功能执行,出现异常时向操控员告警。与低级别的关键区别在于,操控员不需要持续实时监控,但可以在系统告警后随时接管。
L4级别,系统经验证能够在没有操控员介入的情况下有效执行全部功能,操控员信任系统的响应能力,仅负责监视飞行过程,在战略层面协调即可,基本无须直接与系统交互。
例:L4级别的空速控制功能,系统定义空速指令并按照预设监测空速。操控员不主动监测空速,但在空速超出预设限制时,系统可以向操控员告警。
例:L4级别的空中避撞功能,系统探测空中风险冲突,跟踪和预测其它飞行器飞行轨迹,并基于探测的相对位置、飞行路径、局部空域环境和空中交通规则避免飞行器冲突。仅在满足预设条件下,系统通知操控员干预,例如,预测飞行器将突破最小间隔极限,或系统难以精准跟踪入侵的飞行器。
L5-完全自动化
L5-完全自动化,系统完全负责功能执行。由于实际情况限制或ODD特意设计,没有设计权限的操控员无法实时接管。
L5级别,人与系统的交互通常限于提供高级策略指令(例如,飞行前计划)并观察结果。
例:L5级别的空速控制功能,操控员无须监控和干预。
例:L5级别的空中避撞功能,操控员和系统防撞响应之间无须实时交互,任何事件或异常都可以在飞行后进行审查、分析。
2.2 我国无人机系统自动化分级标准
中国民用航空局于2022年发布了行业标准《民用无人驾驶航空器系统分布式操作运行等级划分》(MH/T 2013-2022),该标准根据自动飞行系统可以不依赖人工介入而实施飞行的能力高低,将分布式操作无人驾驶航空器系统自动化等级划分为AL-0至AL-5共6个级别,并对应不同的技术要求。同时,明确了无人机系统分布式操作运行的安全等级标准。该标准按照飞行任务执行、风险因素探测与响应、飞行任务接管、设计运行范围四个要素对自动飞行系统的自动化等级进行划分。
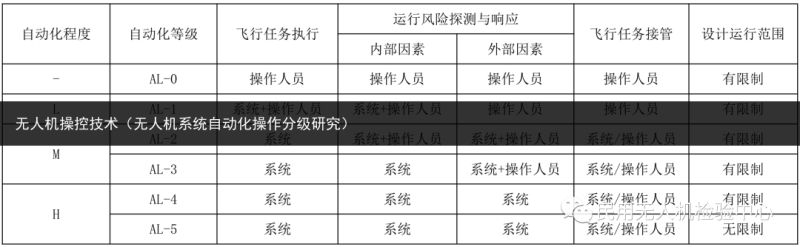
AL-0
AL-0级别,在设计运行范围内,操作人员负责飞行任务执行和运行风险因素探测与响应。无人机运行过程中,驾驶员在后台通过系统操控无人机。AL-0级别的无人机系统并不是无自动化,可包含一些自动化功能,如自动悬停。
AL-1
AL-1级别,操作人员与自动飞行系统共同控制飞行过程,共同承担运行风险因素探测与响应,操作人员可随时接管控制。系统无法继续执飞时,操作人员接管控制。
AL-2
AL-2级别,自动飞行系统控制飞行过程,而无须与操作人员共同控制,操作人员和自动飞行系统共同完成运行风险因素的探测与响应,操作人员在飞行过程中可随时接管控制。与AL-1相同的是,当系统无法继续执飞时,操作人员可以接管控制。
AL-3
随着自动化等级的升高,自动飞行系统发挥作用的范围在扩大。AL-3级别,将运行风险因素分为“内部”和“外部”。自动飞行系统负责飞行任务执行和内部风险因素的探测与响应,系统和操作人员共同负责外部风险因素的探测与响应,操作人员在飞行过程中可随时接管控制。当系统无法继续执行飞行任务时,可以请求操作人员接管控制。当操作人员无应答时,系统可自动进入最小风险状态。
AL-4
AL-4级别,自动飞行系统独立负责飞行控制和运行风险因素的探测与响应。当系统无法继续执飞时,系统可在不额外增加运行风险的前提下重新规划飞行任务或自动进入最小风险状态。操作人员在飞行过程中可申请接管控制,系统在确保不增加安全风险的情况下移交控制权,当系统判断接管会提高安全风险时可暂缓移交控制权。
AL-5
AL-5级别,自动化等级最高级别,飞行过程控制、风险因素探测与响应、系统无法继续执飞情况下的应急处置方法、操控员申请接管的方法与AL-4相同。AL-5级别无设计运行范围限制,能在任何可飞行条件下运行。
2.3 自动化操作分级对比
JARUS和国内无人机系统自动化操作分级对比。
03
分布式操作运行等级验证评估平台
为完善民用无人驾驶航空器分布式操作监管体系,民航局发布了《民用无人驾驶航空器分布式操作试运行等级管理规程(暂行)》。
中国民航科学技术研究院依据分布式操作运行相关规范标准,研制了无人机系统分布式操作运行等级半物理仿真验证评估平台,支持无人机系统分布式操作运行仿真验证。
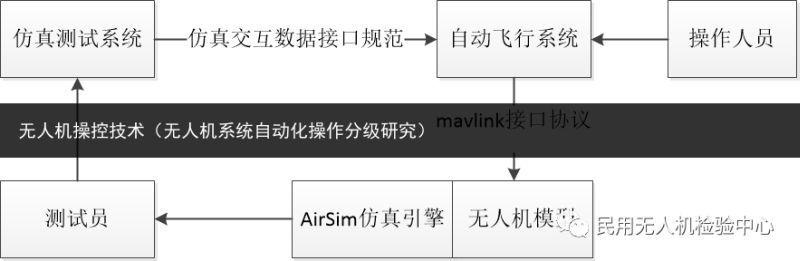
无人机系统分布式操作运行等级验证评估平台(DOLUAS Sim)是面向无人机安全运行技术与分布式操作运行等级验证评估的自动飞行系统在环仿真测试平台,由仿真测试系统、仿真引擎、测试用户接口、测试数据库、自动飞行系统组成,支持多旋翼、固定翼等多种机型接入,具有较强的开放性与拓展性。
平台功能符合MH/T 2013-2022要求,可为申请分布式操作运行等级审定的志愿申请人开展分布式操作无人机系统自动化等级验证与运营人安全保证性评估,可以进行14项自动化能力测试,出具详细的验证评估报告,为运营人提供证明文件。
航科院将持续完善无人机系统运行等级仿真测试工具链,与科研院所、无人机运营企业共同建立行业普遍接受的验证工具和测评方法,支撑无人机系统分布式操作运行。
04
结语
目前,无人机运行管理体系日趋完善,以一部顶层规章、多部规范性文件及技术标准为基础,开放、特定、审定分类管理,管理和技术齐驱并进的法规标准体系框架已基本形成。随着无人机自动化程度的不断提升,分布式操控运行等级评估体系将日趋完善,与适航审定和运行场景高度融合,自动化分类标准成熟定型并广泛应用。运行相关方应急响应和恢复能力的自动化水平不断增强,无人驾驶航空器操控员职责将逐步向自动化系统为主,独立操控责任向安全操作责任人有序转移,操控人员资质管理模式更加便捷高效。
点击蓝字 关注我们



